ロボットという言葉から、何を思い浮かべるだろうか。鉄人28号やガンダムなどのアニメのヒーロー?それともアシモやHRP-4Cなどの現実的なロボット?いずれにせよ、多くの人が描くロボット像は、人間を模した形状の人型ではないだろうか。そんな中、アメーバの一種である粘菌のような単純生物の構造を解明し、その動きをロボットで再現するというユニークなアプローチで、ロボット研究を続けるグループがある。世界唯一の取り組みは、ロボットの常識を一変する可能性を秘めている――。

粘菌のメカニズムがロボット開発に新しいインパクトを与える
「日本での評価は知らないが、ボストンでは君はヒーローだ――」。
2008年10月2日米ハーバード大学。ノーベル賞をもじってユーモアあふれる研究に贈られる「イグ・ノーベル賞」の授賞式が行われ、日本の研究者6人のチームが2008年「認知科学賞」を受賞した。その中の一人、東北大学でロボットを研究する石黒章夫教授は、知人であるハーバード大学の研究者から冒頭の賛辞を送られた。研究は、単細胞生物の真正粘菌が、迷路の入り口と出口に置かれたエサを結ぶ、最短経路を見つけられることを発見したというもの。これにより、「脳も神経もない原始的生物が、高度な情報処理機能を持つ」ことを証明した。
一見何の関連性もなさそうに感じるロボットと粘菌。石黒教授は粘菌に注目した理由をこう話す。

「粘菌が実に単純な生物だからです。アメーバ状の生物で変形しながら移動しますが、この動きが大変興味深いのです」
粘菌は進行方向へゲル状の細胞質を流動させ、自身の形を変えながら移動する。いわゆるアメーバ運動だ。
「ロボット開発を行っていく中で、粘菌から学ぶことは大いにあります。私は、この研究をしなければ、ロボット開発は行き詰まる可能性が高いと考えているのです」
石黒教授は、このもっとも単純な生物の動作をロボットで再現できなければ、ヒトや高度な生物の自然な動作を実現することは難しい、と考えた。目標は生物のようにフレキシブルでしなやかに動くロボットを作ること。その実現には、単純な細胞レベルまで立ち返って生物の動きを考察し、原理を踏まえることが不可欠と考えている。
あたかも生きているように動くロボットを創造したい
東北大学工学部の石黒研究室に足を踏み入れた瞬間から、イグ・ノーベル賞受賞学者の講義が始まった。身振り手振りを交えた明快かつ魅力的な話に、最初からフルスロットルで引き込まれていく。

「最近、汎用のロボットが発売されたり、発表されたりしていますよね。あれは、ほとんどが人型でしょう。つまり人間に似せているわけですが、そのロボットたちが生きているようだと感じたことはありますか?」
そういえば、生きているというか生物っぽさはあまり感じたことはない。ロボットはあくまで機械だからだ。
「そうでしょう。あれは、皆さんの中にある一般的なロボット像を具現化したものです。人の形を模してはいますが、人間の動きを再現しているわけではないのです」
では、生きているように感じるためには何が必要なのだろう。石黒教授は、まずしなやかにやわらかく動くことを挙げた。現在のロボットは「何となくぎこちなく動く」ものという既成概念があり、人間などの生物のようにしなやかに、やわらかく動くことは、むしろロボットらしくないと感じてしまうものである。
「私の研究室では、あたかも生きているように動くロボットの創造をめざしています。そのために、さまざまな生物が動くための“からくり”を、ロボットを使って再現し、理解することから始めようと考えました」
単細胞生物の動きを分析各所が情報処理能力を持つロボット
石黒教授の研究室では、さまざまなロボットの研究が行われている。モジュラーロボットもそのひとつ。これは、モジュールと呼ばれる同じ形をした複数の機械ユニット(小ロボット)の集合体だ。
「例えば、このモジュールを見て下さい」
石黒教授が指差したスチール棚には、機械部品のようなものが10個以上置いてあった。
「このモジュールたちを床にばら撒いて八方に散らしても、各モジュールは必ず一箇所に集まってくるのです。その集合体を再度崩しても元に戻るという単純なモジュラーロボットです」
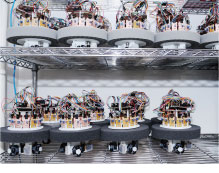


モジュールの全体感は円錐型の形状で、フレームとなる乳白色のプラスチック部品と一見無造作に貼りつけられた電子基板、そしてコイルのようなものが巻きつけてある。ロボットそのものというよりは構成部品という印象だ。
「モジュールは、それぞれ自走する能力がありますが、構造や機能は驚くほど単純なものです。プラスチックのフレームとボディに、どこにでも売っている汎用的なマイクロコンピュータ、モーター、電池、さらにモジュール同士のコミュニケーション用の赤外線通信ユニット、安価な電気部品やコイル、タイヤなどの機構部品など、ありふれたパーツを組み合わせて作っています。このモジュラーロボットで重要な点は、まず中央制御していないということ。既存ロボットの概念から、どこかに脳に相当するコントロールセンターがあり、そこから各モジュールへ命令を出していると考えがちです。しかし、そんなものはどこにもありません」
確かにこのモジュール群のどれかがコントロールユニットで、赤外線通信で制御しているのだろうと無意識のうちに解釈していたかもしれない。
「それぞれのモジュールが、最も近いモジュールとコミュニケーションをとり近づいていく。単にそれだけのことなのですが、連鎖的に起こるとあたかも生きているように動くと感じるのです」
モジュラーロボットには黄色いゴムの風船にモジュラーロボットが取り付けてあるタイプもあった。
「これは、アメーバロボットです。先ほどのモジュールの通信手段は赤外線でしたが、こいつは黄色いゴム風船を媒介しコミュニケーションを行っているのです。ゴム風船を伝ってくる力や方向という情報を処理してそれぞれのモジュールが動くことで、全体でアメーバのような動作を再現しようとしているのです」
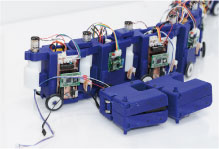
さらに、車輪のついた長方体のモジュールが数珠つなぎになった、ヘビのような動きをするロボットもあった。モジュールの筐体には、簡単なシステム基盤と前後を通信させる配線がある。このロボットはコントローラーによってラジコン感覚で操作ができる。
大きな特徴は、床の抵抗に合わせてロボットが動きを変化させることにある。平地のように抵抗が少ない床は小さく蛇行して真っ直ぐに進み、抵抗が大きい上り坂では大きく蛇行しながら昇っていく。しかし、コントローラーには前後の進行方向を指示するジョイスティックがついているだけである。動きの変化はコントローラーからの命令によるものではない。それぞれのモジュールが自分に与えられる情報を処理し、対応した結果、全体としてリーズナブルな動きが完成する。
「これらのロボットはハイスペックなCPUによる集中制御とは無縁です。個々では何もできないモジュールですが、集合し影響を与えあうことで、あたかも生きているように動くことが判明したのです。その際、重要なのはコミュニケーションです。各モジュールは赤外線やゴム風船を媒介とするコミュニケーションにより入力された情報の処理と、それに基づく適応の連鎖で、あたかも生きているかのように動作します。私はこのように情報処理を分散し、集まることで適応動作をするようなロボットを、地方分権型ロボットと位置づけています」
鉄人28号もガンダムも地方分権型ロボット?
地方分権型ロボットとはどのようなものなのだろう。実はこれまで私たちが親しんできたヒーローロボットの多くは、この構造でなければ成立しないと石黒教授は説明する。
「鉄人28号の主人公の少年が持つコントローラーは、方向を指示するスティックが目立つくらいで、とても簡単な構造に見えます。それでも鉄人28号は、平坦な道はもちろん、急勾配の坂道でも、ぬかるんだ地面でも人間と同じようにスムーズに動きます。命令コマンドが限定されているにもかかわらず、環境に応じた動きがほぼ的確にできるということは、手足などの重要な機構部分をはじめ、ロボットを構成する各部品がコミュニケーションをとり、刻々と変化する情報を処理し、最適な反応をしていなければ無理です」
アニメ機動戦士ガンダムも同じである。つまり多くの人が憧れ熱中したロボットは、情報処理ができる細胞部品が集合した地方分権型のロボットであると考えることができる。ロボットが足を一歩前へ踏み出すという行動も、その場所が上り坂なのか下り坂なのかでは、足の踏ん張りをはじめ全身の動き方が異なる。
「これらを中央集権的にコントロールセンターですべてを制御するには、膨大なプログラミングが必要です。しかし、足の裏や関節などのモジュールが状況情報を処理するようになれば、コントロールセンターの負担は大きく軽減されます。私たちヒトも、どの程度の勾配なのか、また路面の状態はどうなのかなどの条件は、感触を最適な動作に変換するという情報処理を、全身の細胞で一瞬に行っていると言うことができるのです」
形状が行う情報処理で、自然な動きを生みだす
モジュールの筐体製作に3Dプリンターを導入
さて、各モジュールが行う情報処理とそれに対するリーズナブルな反応とは、具体的にどのようなことなのだろう。情報処理と聞くと、どうしてもCPUとかマイコンとか電気的な処理を考えがちだが、ここで言う情報処理は、そういうことではない。

「例えば、以前階段を下りる金属のバネのようなおもちゃが流行しましたが、憶えていますか?」
そういえば、あったような。懐かしい。
「あれは、与えた運動と階段の高さなど環境という情報を、おもちゃの素材と形状が処理し、階段を下りるという対応を実現していると考えられます。つまり、もっともシンプルな情報処理とは、外部条件に反応する形状や素材が生み出すと言うことができるし、それが創りだすものが自然な動きなのです」
このため、石黒研究室では、自由にモジュールの筐体をデザインし、製作することが大変重要である。モジュールの形状が自然な動きを作り出す上で、大きな役割を果たすからだ。
「筐体製作において、手作業ではさまざまな限界がありました。そこで、製作機械の導入を考えたのです」
2008年11月、筐体製作のために3DプリンターDimension(ディメンジョン)を導入した。それまでは、研究生たちによる手作業で行っていた。スライス状に分割した筐体のベースを、配線の通る場所などを丁寧に削りながら積み重ねていくという神経と体力を使う作業であったため、大変な時間と労力がかかったという。しかも手作りのため、どうしても筐体の形が微妙に異なってしまい、研究精度の面での問題も大きかった。
「Dimensionにするか切削機にするかで悩みましたね。Dimensionに決めたのは、複雑な形状をより簡単にスピーディに製作できるという点に魅力を感じたからです。導入後は期待通り、同じ形状の筐体をスピーディにたくさん作れるようになりました。また、設計の自由度が格段に上がったため、筐体のコンパクト化を図ることができ、研究を大いに助けてくれています。良い買い物でした」
実際、石黒研究室内には導入から数ヶ月しか経っていないにも関わらず、Dimensionで製作した筐体がいたるところに置かれている。導入後は研究生からも次々と新しい筐体の提案がなされ、「Dimensionがフル稼働している状態」であるという。
マテリアルサイエンスで実現する どろどろ、べとべとの液状ロボット
石黒教授が、形状と同じく重要視しているのが、しなやかな素材による情報処理と、それが創造するフレキシブルな動きである。

「このアスリート型ロボットは、電気的な制御なしで、つまりこのまま坂を走り降りることを確認しています」
ロボット上部の金属製のフレームには、前後に動く金属製の4本の足が付いている。足は、車のサスペンションのように、ダンパーやスプリングで力を吸収する構造になっている。中央の2本、両端の2本が同時に動くようにそれぞれ固定されており、中央と両端が交互に前後に動くことで走るのだろう。猫や犬などが走るときの足の動きに似ている。
「重要なのは、多少の勾配の違いに適応し転倒することがないように、走り方を変化させるということです。これはロボットを構成する部品の形状や素材の組み合わせによって、推力に対する情報処理を行うことで適応していると考えることができます」
走るという動作のための情報処理を、各部分の機構や素材で分散して行い、それを集合し組み合わせることで適応範囲を広げるという、地方分権型ロボットの基本論理が非常にわかりやすい事例である。
「映画『ターミネーター2』の液体金属ロボットT-1000型を憶えていますか。あれが究極の柔軟性を持つロボットですね」
その形状を変幻自在に変化させていくT-1000型の恐怖は、大きな衝撃とともに多くの人の記憶に残っている。
「どろどろ、べとべとの液状ロボットは、私の目標の一つです。粘菌ロボットの理想系といえるでしょうね。しかし、使い方としては平和的に、家で私を待つペットロボットとか、癒し系にしたいものです。それはさておき、モジュールロボットの1モジュールをMEMSやナノテクノロジーの超微細加工で製造できれば、すでに現実感があることなのです」
石黒教授はマテリアルサイエンスも視野に入れている。
「『生きている』と感じるロボットを創るなら、機械ではなく生物を意識することが必要と思うからです。直感的に『これ、生きている!』と思わせるロボットを作りたいのです。そのためには生物のようにフレキシブルでしなやかに動かなくてはなりません。生物の自然な動きをコンピュータ処理で実現することは難しく、膨大なプログラムと信じられないほど超高速な電気回路による制御が必要になります。それよりも、生物が実際に動く仕組みを、粘菌のような単細胞レベルから研究し、その成果が集合した結果として生物と同じ動きを行えるロボットを作りたいと思っています」
現在は、人型ロボットという大きな器を先に作り、後から中身を整えていく開発方法が主流となっている中で、ある意味逆のアプローチで研究を進める石黒教授。まだ研究は始まったばかりであり、細胞を模した地方分散型ロボットは、まだまだ不恰好で地味である。しかし、ロボット開発におけるいくつもの壁を飛び越え、さらに、私たちの想像を超える、ロボットの既成概念が崩壊するような新しいロボットを創りだす日が来るに違いない。石黒教授の教育理念は、「置き換え不能な人材を育てる」である。研究室ができてからまだ3年と日は浅いが、この唯一無二のロボット研究の中で、多くの学生がアイデア創造に開眼し「化ける」という。ここから、多くの研究者が巣立っていくのだろう。新種の細胞は、解き放たれた先で成長し新しい生物を創造する。各地で誕生した新生物は、将来この地に集合し誇らしげに成果を語り合う。その中心には、日本酒の一升瓶と、置き換え不能な笑顔の石黒教授が座っていることだろう。